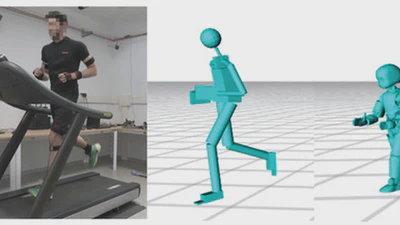
iCub3 avatar system: Enabling remote fully immersive embodiment of humanoid robot
We present an avatar system designed to facilitate the embodiment of humanoid robots by human operators, validated through iCub3, a humanoid developed at the Istituto Italiano di …
Stefano Dafarra
•
•
1 min read